【手持激光3D扫描仪RigelSLAM】
中观新品 | 这次升级“大有看头”:RigelSLAM赋彩而来


灵活的移动测量方案
>>>产品融合激光雷达(LiDAR)和惯性导航系统(IMU),可以在各种环境中自由移动、连续获取精准的空间信息;算法卓越,扫描过程中数据实时解算,实时建图预览。

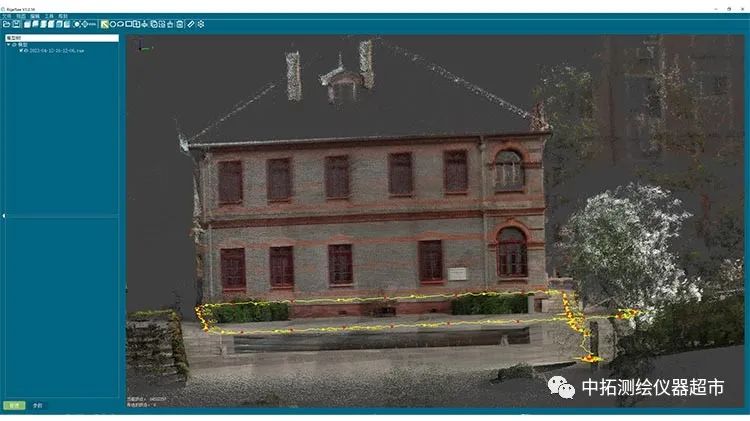
全彩点云真实直观
>>>全新定制化全景相机可同步获取空间色彩属性,实时扫描、全彩显示,直接导出即为全彩点云数据,为用户利用提供更直观、更真实的参考。

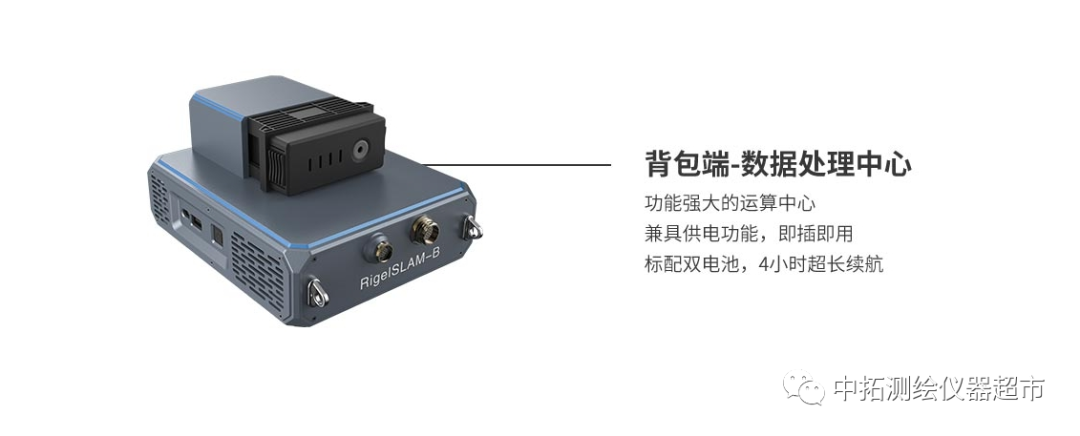
原生软件功能强大
>>>扫描过程中实时建图并可实时预览,扫描完成无需后处理,建图结果导出即用,作业效率大幅提升
便捷交互操作自如
>>>屏幕虚拟键结合实体按键,操作更自如;内置高清触控屏,数据实时预览/回放查看,可灵活切换,并支持全局缩放/平移旋转,随心操作,一键复位。

便携设计轻松作业
>>>设备设计舒适便携,即拿即用,轻松实现移动测量;另可选配机械手臂,省力担当,长时作业无负担。

云南省昆明市地标建筑——金马碧鸡坊,现场采集数据后期出效果图,真色彩,身临其境,很直观。
云南昆明网红打卡地——胜利堂(酒杯楼)

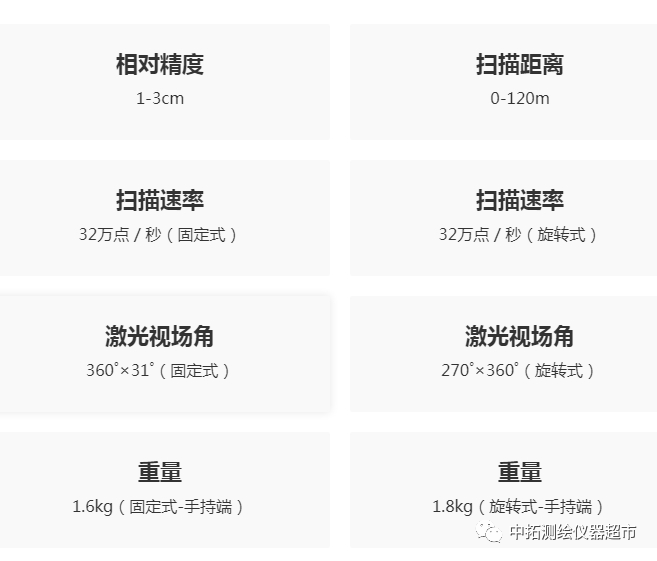
技术规格
|
RigelSLAM 产品参数
|
|
产品型号
|
RigelSLAM-E16
|
RigelSLAM-C16
|
|
作业方式
|
固定式
|
旋转式
|
|
激光线数
|
16
|
|
扫描速率
|
320000点/秒
|
|
视场角度
|
360×31°
|
270×360°
|
|
激光等级
|
Class l(人眼安全)
|
|
工作范围
|
0~120m
|
|
相对精度
|
1~3cm
|
|
绝对精度
|
2~5cm
|
|
交互方式
|
虚拟/实体按键+高清触摸显示屏
|
|
解算方式
|
实时解算
|
|
技术原理
|
SLAM技术
|
|
外接方式
|
WiFi/Bluetooth/USB3.0/Type-c
|
|
场景适配
|
支持包括街道、建筑、室内、野外、地库等多种场景
|
|
数据输出
|
支持网络/有线传输
|
|
设备输出格式
|
输出加密的.raw格式(数据保密)
|
|
配套软件
|
RigelSee(原生软件)
|
|
软件输出格式
|
支持输出包括.las、pcd、 .ply、 .raw格式
|
|
工作时间
|
2小时(单块电池)
|
|
工作温度
|
-20℃~50℃
|
|
固态硬盘容量
|
500GB/1TB
|
|
显示方式
|
设备和软件均支持RGB(彩色)、Intensity(强度)、Z-Value(高程)显示查看
|
|
防护等级
|
IP54
|
|
产品材质
|
铝合金骨架+ABS外壳(高防护、高抗干扰)
|
|
重量
|
1.6kg(手持端)
|
1.8kg(手持端)
|
|
产品型号
|
双目测绘相机
|
|
镜头数量
|
2
|
|
视场角度
|
水平视场角360°垂直视场角180°
|
|
相机像素
|
1800万
|
|
数据格式
|
JEPG/RAW
|
|
安装方式
|
外接螺栓固定
|
|
重量
|
270g
|